

El sistema de encajado desarrollado por Code X Technologies S.L. ofrece una amplia flexibilidad y adaptabilidad, destacando por las siguientes características:
 Confecciones personalizables: Permite configurar cualquier tipo de presentación o confección que el cliente requiera, incluyendo el uso de cajas con alveolos.
Confecciones personalizables: Permite configurar cualquier tipo de presentación o confección que el cliente requiera, incluyendo el uso de cajas con alveolos. Adaptación mecánica total: Al ser un desarrollo 100% propio, el sistema puede adaptarse mecánicamente a las necesidades específicas del cliente sin comprometer el rendimiento ni los resultados.
Adaptación mecánica total: Al ser un desarrollo 100% propio, el sistema puede adaptarse mecánicamente a las necesidades específicas del cliente sin comprometer el rendimiento ni los resultados. Integración con líneas automatizadas: Es posible adaptar el sistema de suministro de cajas para conectarlo con una línea automatizada del cliente, permitiendo que el robot recoja directamente las cajas de dicha línea.
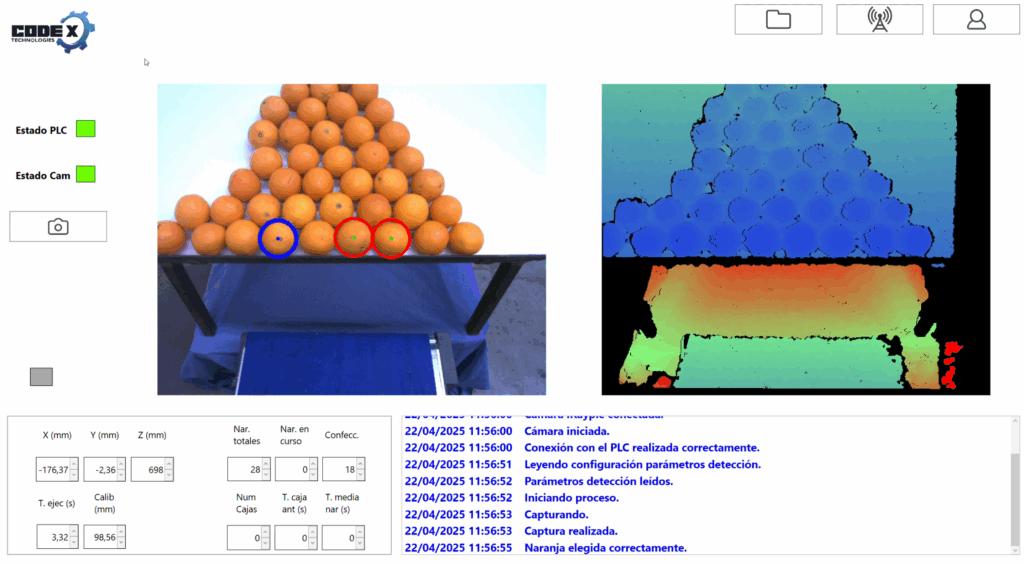
Integración con líneas automatizadas: Es posible adaptar el sistema de suministro de cajas para conectarlo con una línea automatizada del cliente, permitiendo que el robot recoja directamente las cajas de dicha línea. Compatibilidad con diferentes calibres: Se ha validado el funcionamiento con varios calibres de naranjas, demostrando la robustez y precisión del sistema.
Compatibilidad con diferentes calibres: Se ha validado el funcionamiento con varios calibres de naranjas, demostrando la robustez y precisión del sistema.
 Versatilidad de frutas: Aunque el prototipo está enfocado en naranjas, el sistema también es apto para mandarinas y puede reprogramarse fácilmente para otros productos hortofrutícolas como melocotones, manzanas o tomates, entre otros.
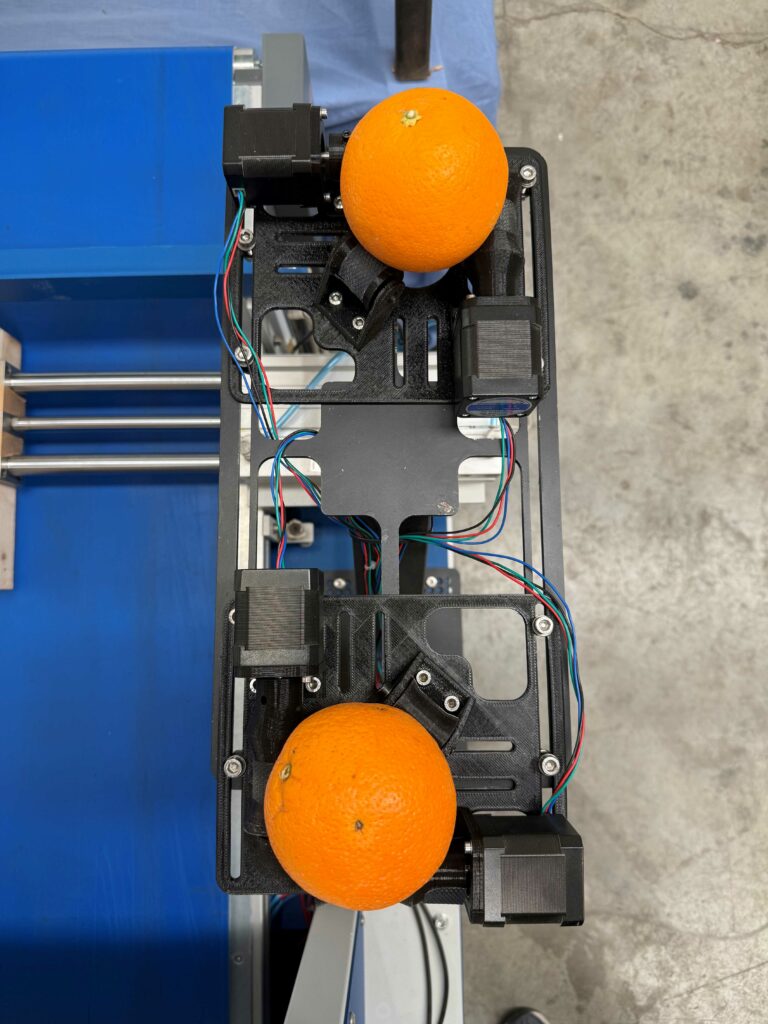
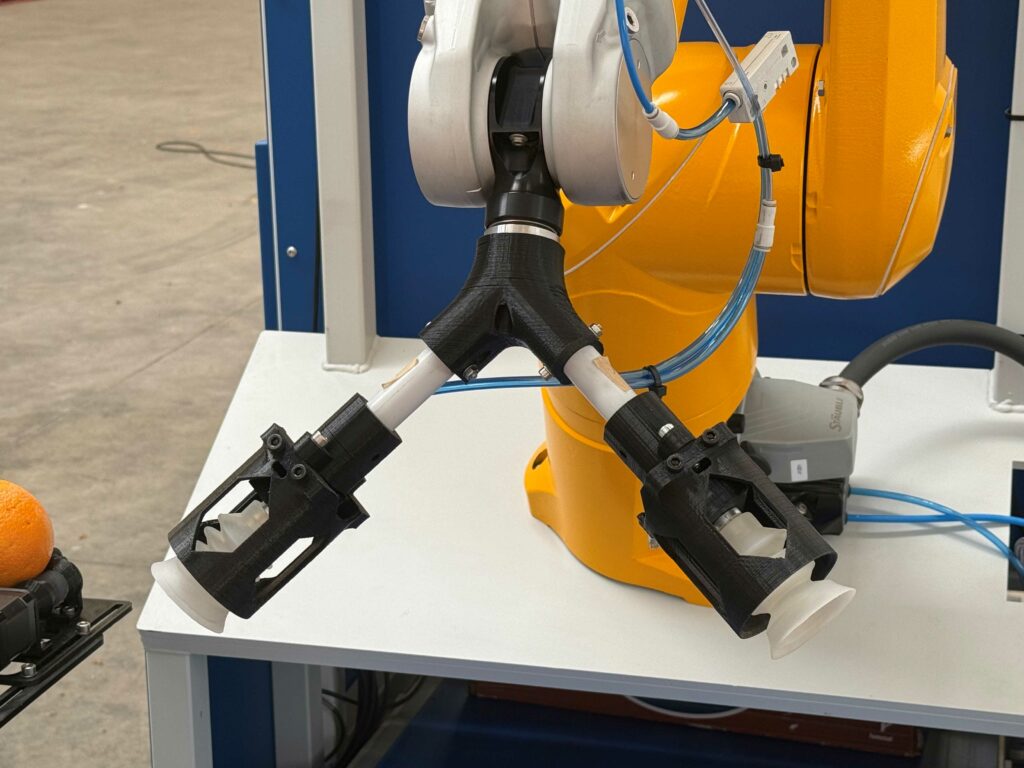
Versatilidad de frutas: Aunque el prototipo está enfocado en naranjas, el sistema también es apto para mandarinas y puede reprogramarse fácilmente para otros productos hortofrutícolas como melocotones, manzanas o tomates, entre otros. Garra doble delicada: El diseño de la garra doble garantiza una manipulación suave del fruto, evitando daños durante el proceso de recogida y colocación.
Garra doble delicada: El diseño de la garra doble garantiza una manipulación suave del fruto, evitando daños durante el proceso de recogida y colocación.